|
・ワークは上に置き、タップは下から上にが基本レイアウトです。 ・プレス間搬送用ロボットの中間置き台と入れ替える形で配置できます。 ・加工スタートのタイミングは近接センサーで取るので、製品がジグ上に置かれたらすぐに加工します。 ・ワークはバキュームで固定します。真空装置を標準装備しているため、ジグ上にバキュームカップを取り付ければ使えます。 ・加工給油装置も標準装備です。乾燥性の加工油もOK。 |

|
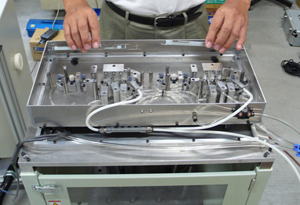

搬送ロボット用の中間置き台の代わりにタップジグを配置
(分離式制御盤はオプション)
・加工ジグはサーボタップ本体の上に載せるように作ります。製品サイズが大きい場合は別置きも可能です。 ・加工タイミングを近接センサーで取るので、ロボットではなく人間の手置きでも加工することができます。 ・ジグのタップ刃/回転軸はサーボタップ本体からロッドで繋ぎ駆動させます。 ・取付けはワンタッチユニバーサルジョイントなので、脱着は簡単にすぐ出来ます。 ・一度に加工できる軸数はサーボタップ本体の軸数によって変わります。標準の10軸から36軸(大型機)まで実績があります。 |
|


・プログタップユニットを使って簡単に多軸ジグが構成できます。 ・ジグプレートは複数ワークを共有して使用することができて経済的です。 ・ジグ板に直接ワーク外形、タップ位置をケガキ入れてセットするだけの簡単操作。 ・側面方向にセットする事も可能です。 |
|